Imagine taking on a mountain trail with loose rocks, gaps between them, sudden inclines, and tight squeezes between boulders. But instead of sharing the trail with another hiker, you spot a robot moving nimbly along. Researchers at the University of Michigan have trained humanoid robots to tackle such terrain.
Their new AI framework, called LEGO-H, trains human-shaped robots to independently navigate rough ground. A simple idea, but incredibly complex in practice.
Until now, robots have been able to walk on flat, even surfaces. Even then, they needed almost constant human guidance. Until now, researchers have viewed the two parts of forward movement — where to go and how to move — as separate problems. This time, they decided to combine them.
These robots learn how to plan a route and control their walking motion in tandem.
“Unifying navigation and locomotion in a single learning framework lets the robots develop their own movement strategies based on the situation without any human pre-programming,” explained Kwan-Yee Li, the lead author of the study.
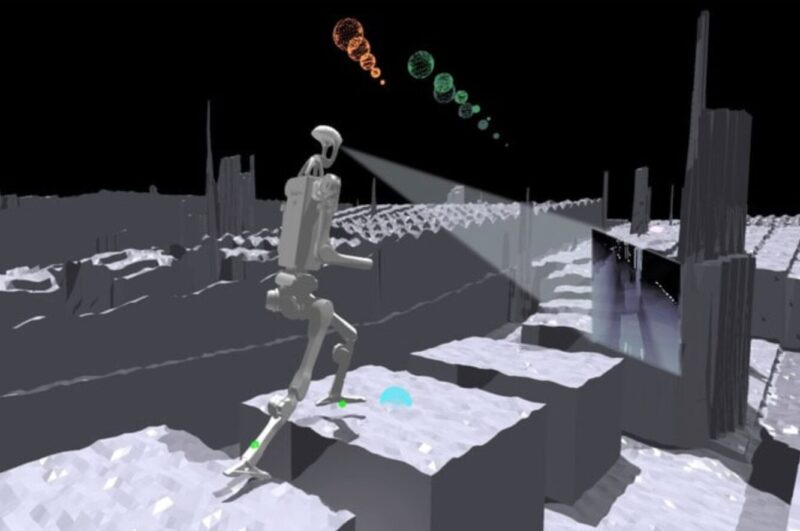
The robots receive visual input, GPS direction and distance, and body awareness — knowledge of their own shape, balance, and joints.
“Our model is the first that could give a humanoid robot the ability to see, decide, and move entirely on its own — not just walking, but hopping, stepping, or jumping as the trail demands,” said co-author Stella Yu. “Until now, humanoids have mostly been ‘blind,’ dependent on human operators for every movement decision.”
In the simulations, researchers placed the robots into virtual hiking trails of five different types, each with an increasing level of difficulty. They then asked them to reach a specific point. The robots come in two sizes — a six-foot adult and a smaller “child-sized” model. Researchers measured their success in the simulation using three factors: completeness, safety, and efficiency.
Body awareness the key
Often, the robots matched or even exceeded the safety and efficiency of robots that received knowledge of the terrain in advance. The built-in body awareness turns out to be crucial. When that was removed, the robots’ performance dropped noticeably.
Many behaviors emerged naturally. For example, when encountering a tight passage, the robot learned to lean sideways. After a stumble, the robot could regain its balance without being programmed to do so.
To simplify things, the researchers kept the robot’s upper body fixed to avoid extra complexity in modeling. The next step is to extend their system to include upper-body movement so that the robots have full-body coordination.
This project is more than just showing what a robot can do. It has huge real-world applications. In the future, such robots could perform search and rescue in rugged or disaster-affected terrain and monitor the health of a remote ecosystem.





